

Co zrobić, żeby autonomiczne samochody jeździły jak doświadczeni kierowcy?

Oprac.: Michał Domański
Autonomiczne samochody to w zasadzie roboty na kołach, realizujące tylko takie scenariusze i sekwencje zachowań, jakie umożliwia ich oprogramowanie. Oczywiste jest, że twórcy zaprogramują je w taki sposób, aby przestrzegały przepisów drogowych. Jeśli jednak będą to robiły mechanicznie i na ślepo, to szybko może się okazać, że staną się zawalidrogami irytującymi wszystkich dookoła. Naukowcy Toyoty postanowili zmierzyć się z tym problemem z pomocą kolegów z Uniwersytetu Michigan.

Spis treści:

Toyota Collaborative Safety Research Center (CSRC) nawiązało współpracę z ekspertami z ośrodka badań i testów Mcity Uniwersytetu Michigan. Naukowcy z obu instytucji prowadzą wspólnie prace badawczo-rozwojowe, które mają ustalić parametry uprzejmego, przewidywalnego i akceptowalnego zachowania samochodów autonomicznych na drogach. Na początek zrealizowali dwa projekty mające sprawdzić, jakie zachowania kierowców są uważane za naturalne czy normalne.
Autonomiczne samochody jako zwykli uczestnicy ruchu
To dopiero początek szeroko zakrojonych badań Toyoty, których celem jest ustalenie, jak autonomiczne samochody powinny się poruszać, żeby nie wywoływać złości u kierowców innych samochodów oraz nie tworzyć niebezpiecznych sytuacji przez dokładne przestrzeganie każdego przepisu drogowego.


Jeszcze kilka lat temu problem ten mógł się wydawać czysto akademicki. Jednak kiedy kolejne autonomiczne samochody zaczęły wyjeżdżać na publiczne drogi, szybko stało się jasne, że ich zachowanie częściej przypomina adeptów w samochodach nauki jazdy niż doświadczonych kierowców. Jeśli autonomiczne samochody mają zostać zaakceptowane przez użytkowników dróg, nie mogą się poruszać, jakby brali udział we włoskim strajku i swoją nadmiernie ostrożną jazdą generować korki czy niebezpieczne sytuacje na drodze. Wystarczy wyobrazić sobie samochód jadący po trasie szybkiego ruchu z przepisową prędkością 120 km/h, który nagle, w ciągu kilku sekund zwalnia do 70 km/h z powodu znaku ograniczenia prędkości przed przejściem dla pieszych. To nie tylko skrajnie irytujące, ale może wręcz doprowadzić do stłuczek.

W miarę jak zbliżamy się do wdrożenia autonomicznych pojazdów do publicznego użytku, modyfikujemy nasze myślenie o bezpieczeństwie, aby uwzględniać ludzkie zachowania i reakcje. Chodzi o to, by autonomiczne samochody wchodziły w interakcje z korzystającymi z dróg ludźmi w sposób, który nie będzie kłócił się z powszechnym poczuciem tego, jak zazwyczaj zachowują się kierowcy. Uważamy, że dzięki temu nie będą stwarzać potencjalnych zagrożeń dla bezpieczeństwa. Jak to zmierzyć i porównać ze stylem jazdy prawdziwych kierowców, pozostaje kwestią otwartą.
Jak zbadać intuicyjne zachowania kierowców
Pierwsze badanie tego rodzaju przeprowadzone przez Toyota Collaborative Safety Research Center dotyczyło tego, jak kierowcy wykonują na skrzyżowaniu manewr skrętu w lewo. Naukowcy chcieli sprawdzić, jak duża przerwa w strumieniu pojazdów nadjeżdżających z naprzeciwka musi się pojawić, aby doświadczeni kierowcy zdecydowali się przeciąć przeciwległy pas. Zbyt duża ostrożność wywołuje zniecierpliwienie u kierowców czekających na swoją kolej do skrętu. Ale zbyt odważne wykonanie manewru zwiększa ryzyko kolizji i wywołuje niepokój u osób prowadzących nadjeżdżające samochody. Trzeba więc ustalić istotne parametry i zdefiniować normy, jakimi intuicyjnie kierują się osoby za kółkiem.
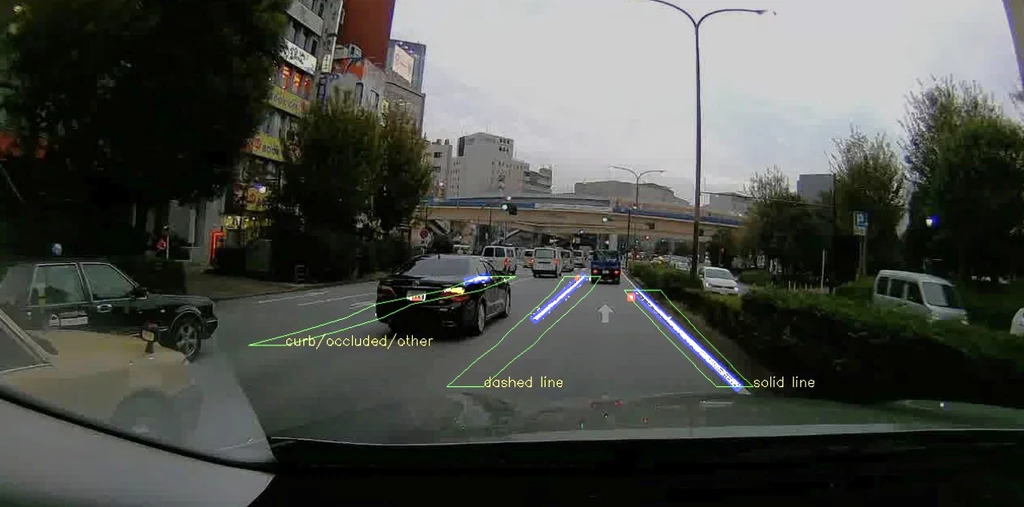
W pierwszej kolejności trzeba było znaleźć odpowiednie skrzyżowanie do przeprowadzenia badań. Zespół wybrał przecięcie dróg w Jackson Hole w stanie Wyoming, przy którym kamery nagrywały ruch samochodów 24 godziny na dobę. Po zebraniu wielu godzin materiału filmowego i przekształceniu obrazów w rzut z lotu ptaka naukowcy wykorzystali uczenie maszynowe do pomiaru reakcji kierowców na ruch uliczny. Udokumentowano ponad 5000 sytuacji na drodze, a następnie skategoryzowano luki między nadjeżdżającymi samochodami jako dopuszczalne i niedopuszczalne dla wykonania skrętu w lewo. Uwzględniono przy tym zachowania kierowców w czasie deszczu, śniegu i przy dobrych warunkach pogodowych.
Jednym z najbardziej interesujących odkryć było to, że ludzie zwykle kierują się odległością jako głównym czynnikiem decydującym o tym, czy skręcanie na skrzyżowaniu w lewo jest bezpieczne. Sugeruje to, że częściej dokonują oceny na podstawie tego, co widzą, zamiast starać się oszacować prędkość nadjeżdżających pojazdów lub czas potrzebny na wykonanie skrętu.
Zespół badawczy Toyoty i Uniwersytetu Michigan zastosował podobne podejście do badania interakcji kierowców na rondzie. Jak powiedział John Lenneman, dla osób wjeżdżających na rondo kąt ustawienia zbliżających się samochodów i ciężarówek miał większe znaczenie niż odległość. Wygląda na to, że kierowcy dokonują geometrycznej oceny trajektorii nadjeżdżających pojazdów, aby ustalić, czy wjechanie na rondo jest bezpieczne.

Tego rodzaju badania to dopiero początek. Równie ważne jest ustalenie, w jaki sposób samochody prowadzone przez kierowców mogą bezpiecznie korzystać z dróg razem z pojazdami autonomicznymi. Wyzwania nie ograniczają się do interakcji z samochodami. Kierowcy stają się bardziej ostrożni w pobliżu rowerzystów, motocyklistów i pieszych. Autonomiczne pojazdy muszą nauczyć się tego samego.
John Lenneman z ośrodka badawczego Toyoty zapewnia, że prędzej czy później samochody autonomiczne trafią na rynek, dlatego potrzeba znacznie więcej badań, aby z czasem programiści byli w stanie odwzorować intuicyjne zachowania ludzi kierujących pojazdami. W ostatecznym rachunku chodzi o to, żeby zapewnić harmonijne współistnienie kierowców i ich autonomicznych odpowiedników.
Toyota pracuje nad autonomią wielotorowo

W pracach nad autonomicznymi pojazdami Toyota stawia na wewnętrzną konkurencję, podpartą życzliwą współpracą. Zupełnie jakby to był Rajd Dakar. Obok Toyota Collaborative Safety Research Center głównym ośrodkiem badań tego typu w strukturach japońskiego producenta jest amerykańska firma badawczo-rozwojowa Toyota Research Institute, która rozwija systemy Guardian i Chauffeur - pierwszy wspierający kierowcę w trudnych bądź niebezpiecznych momentach, a drugi w pełni autonomiczny. Systemy te są doskonalone przy pomocy floty samochodów autonomicznych Platform 4 (TRI P4) zbudowanych na bazie Lexusa LS.
Własne prace nad autonomicznymi pojazdami realizuje grupa Woven Planet Holding, której głównym zadaniem jest budowa eksperymentalnego, prototypowego miasta przyszłości Woven City. Za transport osób i towarów mają w nim odpowiadać bezemisyjne, autonomiczne pojazdy, w tym poruszające się samodzielnie pojazdy e-Palette, które z wyglądu są czymś pomiędzy autobusem a wagonem. Ich modułowe wnętrze pozwala szybko całkowicie je przemodelować, aby ten sam pojazd mógł służyć jako mobilny sklep, biuro, miejsce noclegu, niewielki autobus czy bus do transportu niepełnosprawnych.

Jednocześnie Toyota stale nawiązuje współpracę ze startupami i młodymi zespołami zajmującymi się autonomicznym prowadzeniem, sztuczną inteligencją czy zaawansowanymi technologiami cyfrowymi. Najnowsze przykłady to startup Renovo Motors pracujący nad systemem operacyjnym dla samochodów, firma Carmera specjalizująca się w technologiach automatycznego generowania map HD, niezbędnych dla autonomicznych samochodów, oraz spółka Nuro, która opracowała autonomiczne pojazdy dostarczające zakupy czy zamówione jedzenie.
***







